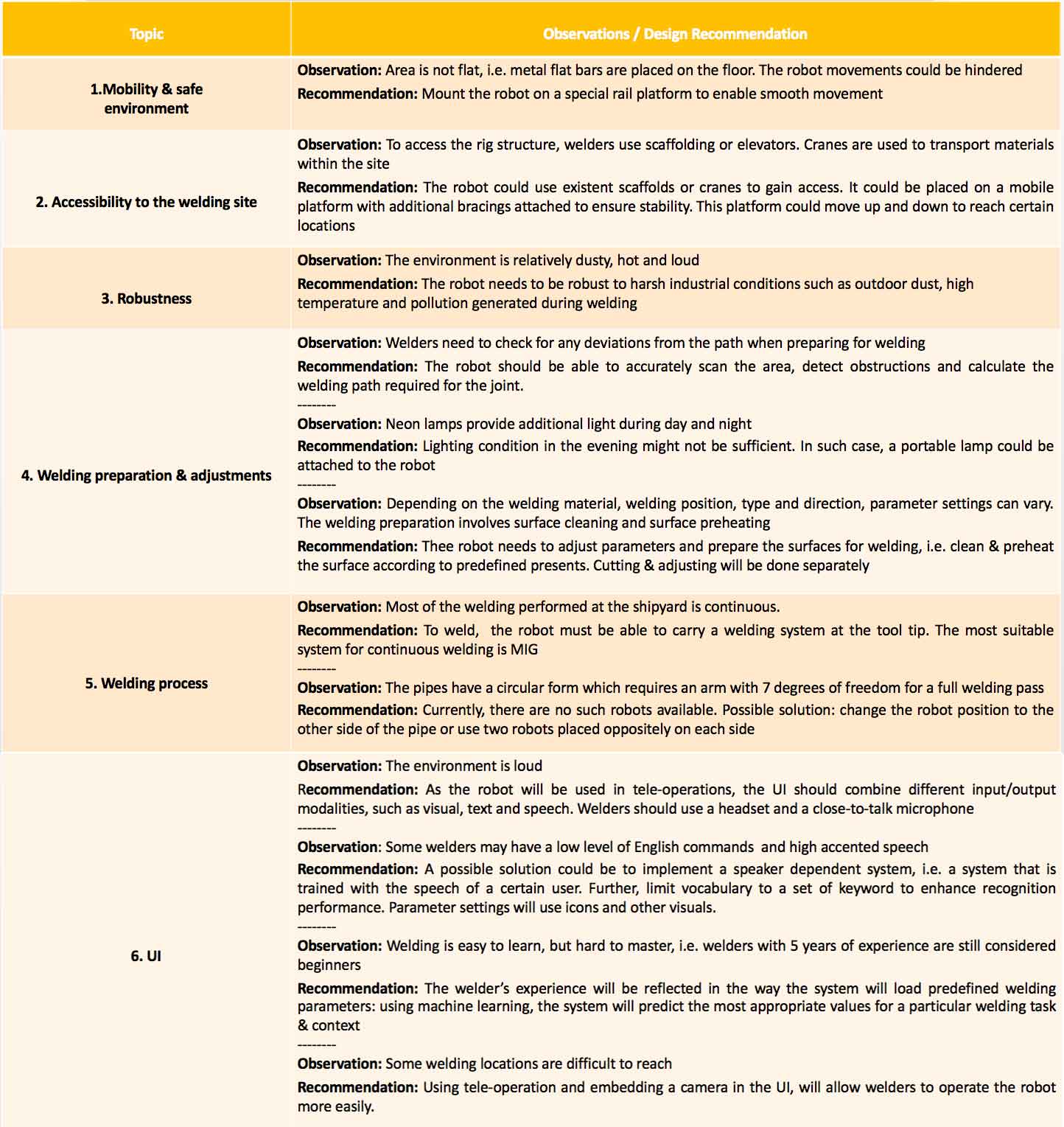
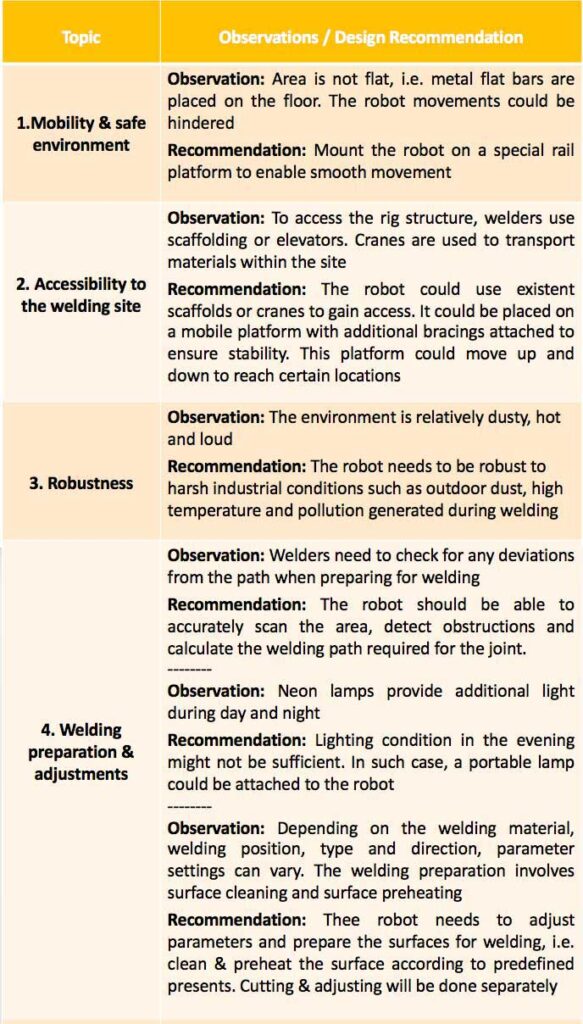
The shipyard is spread over a 68 hectares area operating four graving docks. Within the main area several large halls are located were welders work. Metal plates, pipes and other welding materials are deposited near the entrance or along the hall’s sides. To transport them inside the hall, load rail flat wagons and cranes are used. The floor is covered with transversal flat metal bars (see fig. 2a).
Due to ongoing working processes the environment is dusty, hot and loud. However, the open entrance sides of the halls ensure moderate ventilation and natural light. On the top, several neon lamps provide additional light during the day and at night.
Metal surfaces are first cut using a special cutting machine and then transported to the welding location. Before (and after) welding, the surface is cleaned with brooms to remove metal parts and dust (see fig. 2b).
Most of the welding jobs are done manually. Usually, welders work in groups of 3-4 people. Each group is accompanied by a senior supervisor who assigns tasks and ensure the welding is performed up to the standards. There are also a few automatic welding jobs performed with a machine (see fig. 2c). In average, the automatic welding machine is three times faster than a human welder. However, the machine can be used only for horizontal welding processes and only when the welding path is straight. For any path deviations, edges, minor repairs or critical spits manual welding is required (see fig. 2d).
The pipe welding for jack-up rigs is also done only manually. The complicated structure of the rig and the circular form of the pipes make difficult to automatize the process: the place is narrow and the pipe requires the usage of a welding arm with 7 degrees of freedom for a full pass.
To access the rig structure, welders use scaffolds or elevators. It takes about 2 weeks to align a complete structure. First, the pipes need to be profile cut. Then, they are brought by crane to the joint location. Once the alignment is proof checked, the welders attach metal holders to keep the pipes together and start filling the gaps.
In general, welding seem to be easy to learn, but hard to master: a welder with 5 years of experience is considered still a beginner. Welding is also an intense physical activity: welders are often standing, bending over, getting on their knees, stretching their arms to reach a remote welding spot or squatting under the pipe structure or climbing on the jack-up rig.
")